Portfolio item number 1
Short description of portfolio item number 1

Short description of portfolio item number 1
EECS 442 Computer vision course work 
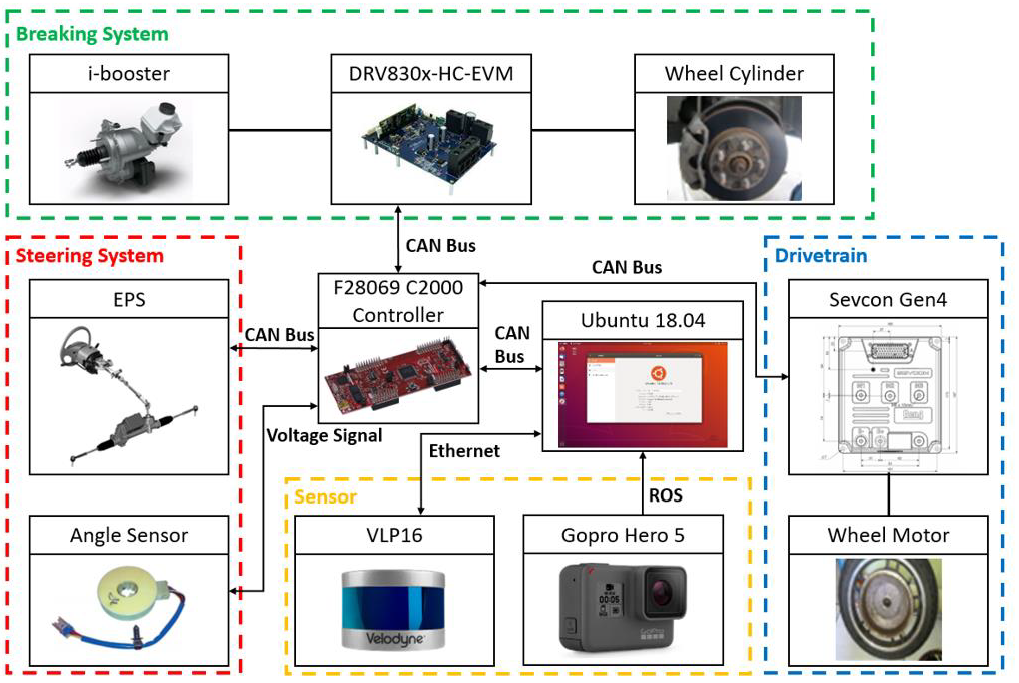
Embedded System course work
c++ programming for solving issues

Solve the trajectory in 2D and 3D with GTSAM

visualize the drifting trajectory
Autoware application
robotarm and mobile robots
use ES-EKF to estimate the location with IMU, GNSS, and LIDAR data provided. 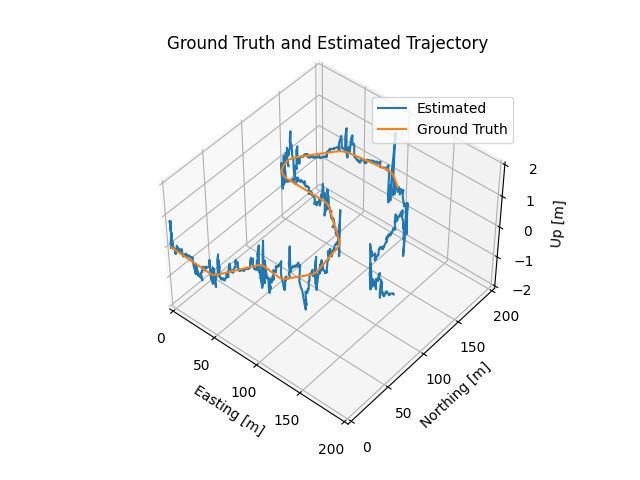
Applied adaptive threshold identification on gaussian-blured image with self-annotated rectangle