
Error-State Extended Kalman Filter for Vehicle Localization
Goal
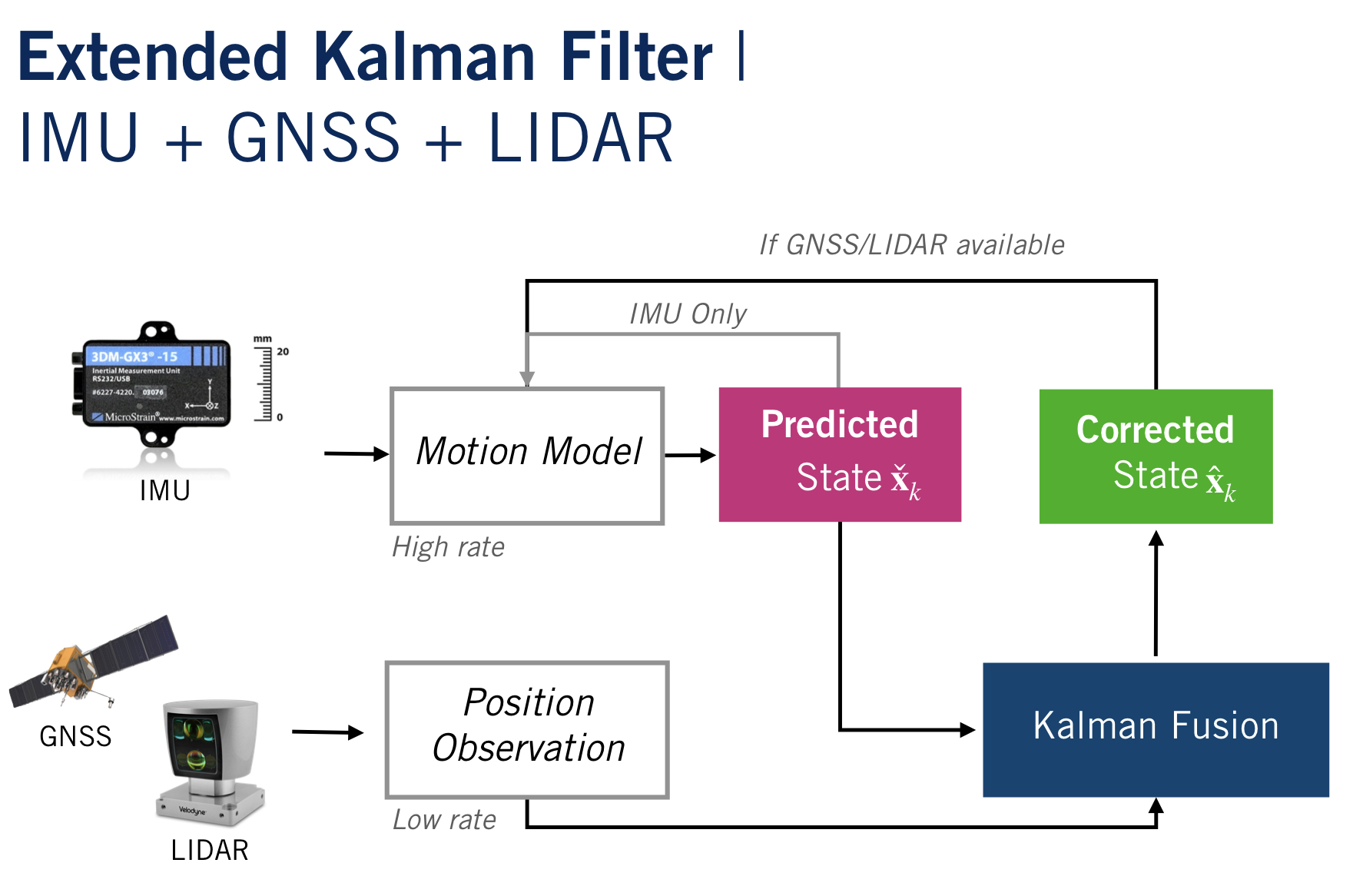
Use IMU to predict the state of the vehicle and correct the actual state with GNSS or LIDAR data.
What was achieved
- Localized a vehicle with ES-EKF using prerecorded sensor data, including IMU, GPS, and LIDAR position updates
- Examined the effects of sensor miscalibration on vehicle pose estimates, and adjusted the filter to compensate for errors
- Investigated the effects of sensor dropout on the vehicle position estimate and the uncertainty in the position estimate
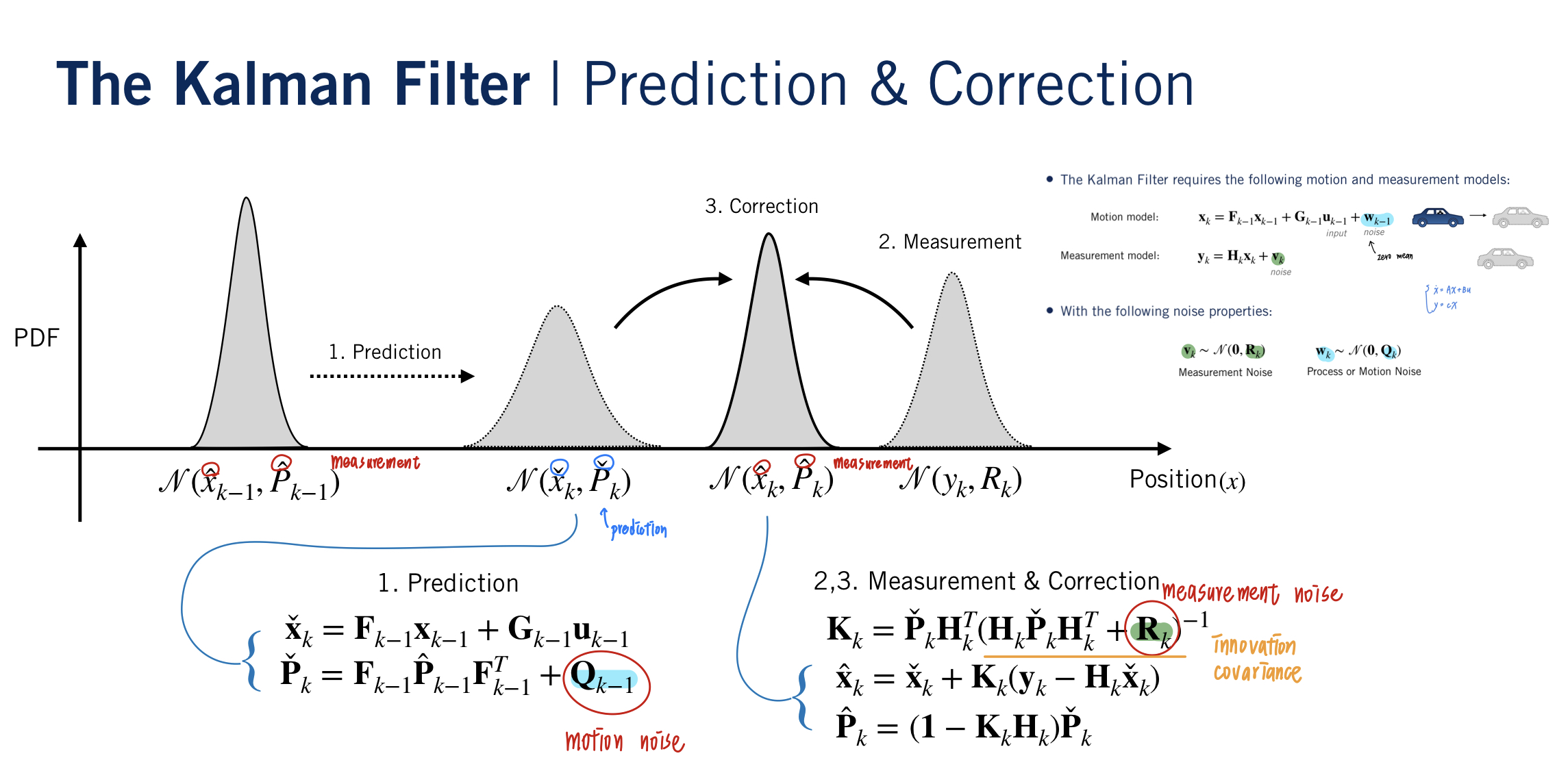
Measurement update with Kalman filter
def measurement_update(sensor_v ar, p_cov_check, y_k, p_check, v_check, q_check):
'''
We update the measurement with both the GNSS and the LIDAR data.
inputs
- p_cov_check -> predicted covariance
- y_k -> measurement
- p_check, v_check, q_check -> innovation
'''
# 3.1 Compute Kalman Gain
R = np.identity(3) * sensor_var # change the sensor variance to covariance
innovation_cov = h_jac.dot(p_cov_check).dot(h_jac.T) + R
K = p_cov_check.dot(h_jac.T).dot(np.linalg.inv(innovation_cov))
# 3.2 Compute error state
sigma_x_hat = K.dot(y_k - p_check)
# 3.3 Correct predicted state
sigma_p = sigma_x_hat[:3] # change in position
sigma_v = sigma_x_hat[3:6] # change in velocity
sigma_phi = sigma_x_hat[6:] # change in orientation
# corrected
p_hat = p_check + sigma_p
v_hat = v_check + sigma_v
q_hat = Quaternion(euler=sigma_phi).quat_mult_right(q_check)
# 3.4 Compute corrected covariance
p_cov_hat = (np.identity(9) - K.dot(h_jac)).dot(p_cov_check)
return p_hat, v_hat, q_hat, p_cov_hat
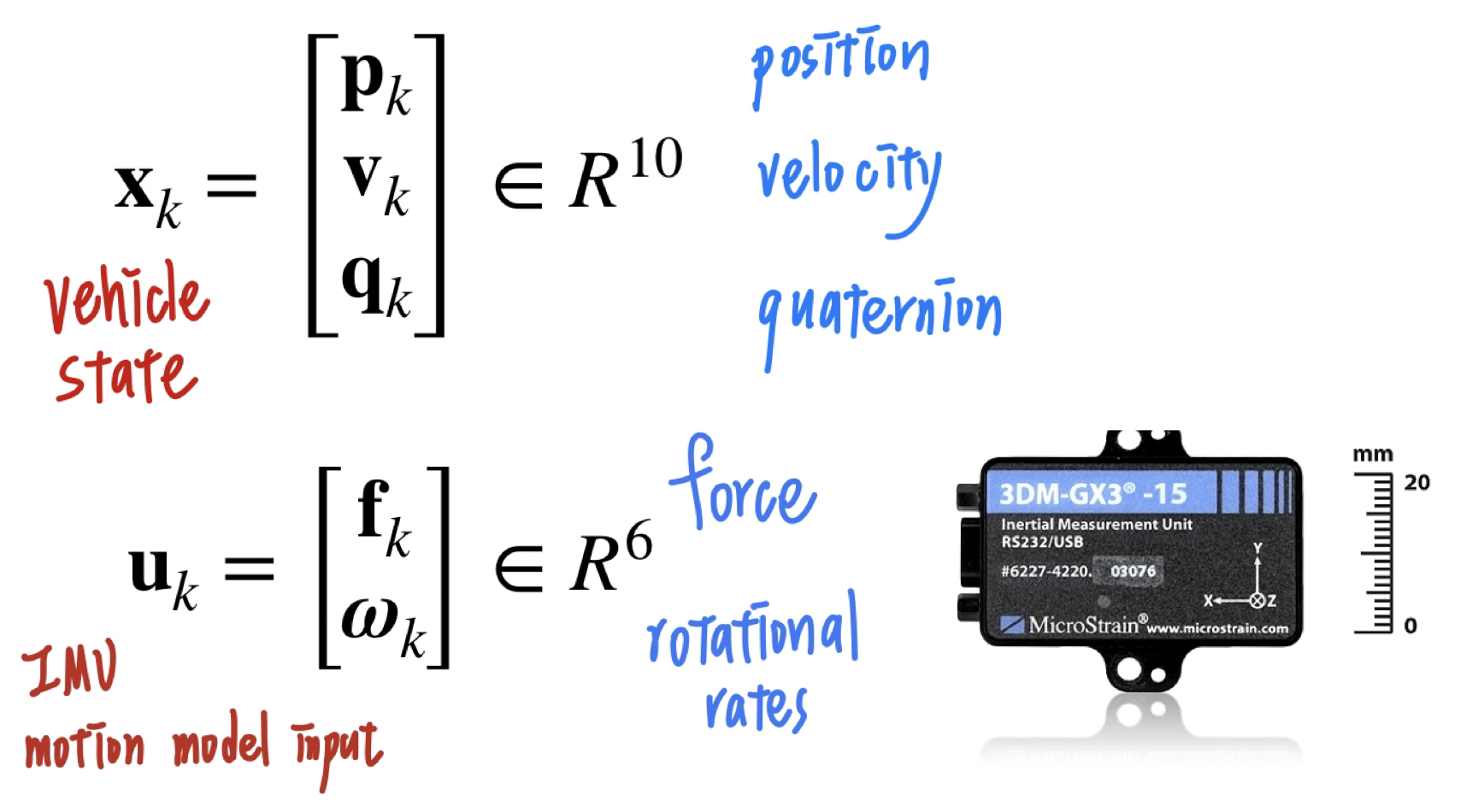
Main filter loop
| vehicle state and IMU model input | Main loop |
|---|---|
 |
 |
f = open("demofile2.txt", "a")
for k in range(1, imu_f.data.shape[0]): # start at 1 b/c we have initial prediction from gt
delta_t = imu_f.t[k] - imu_f.t[k - 1]
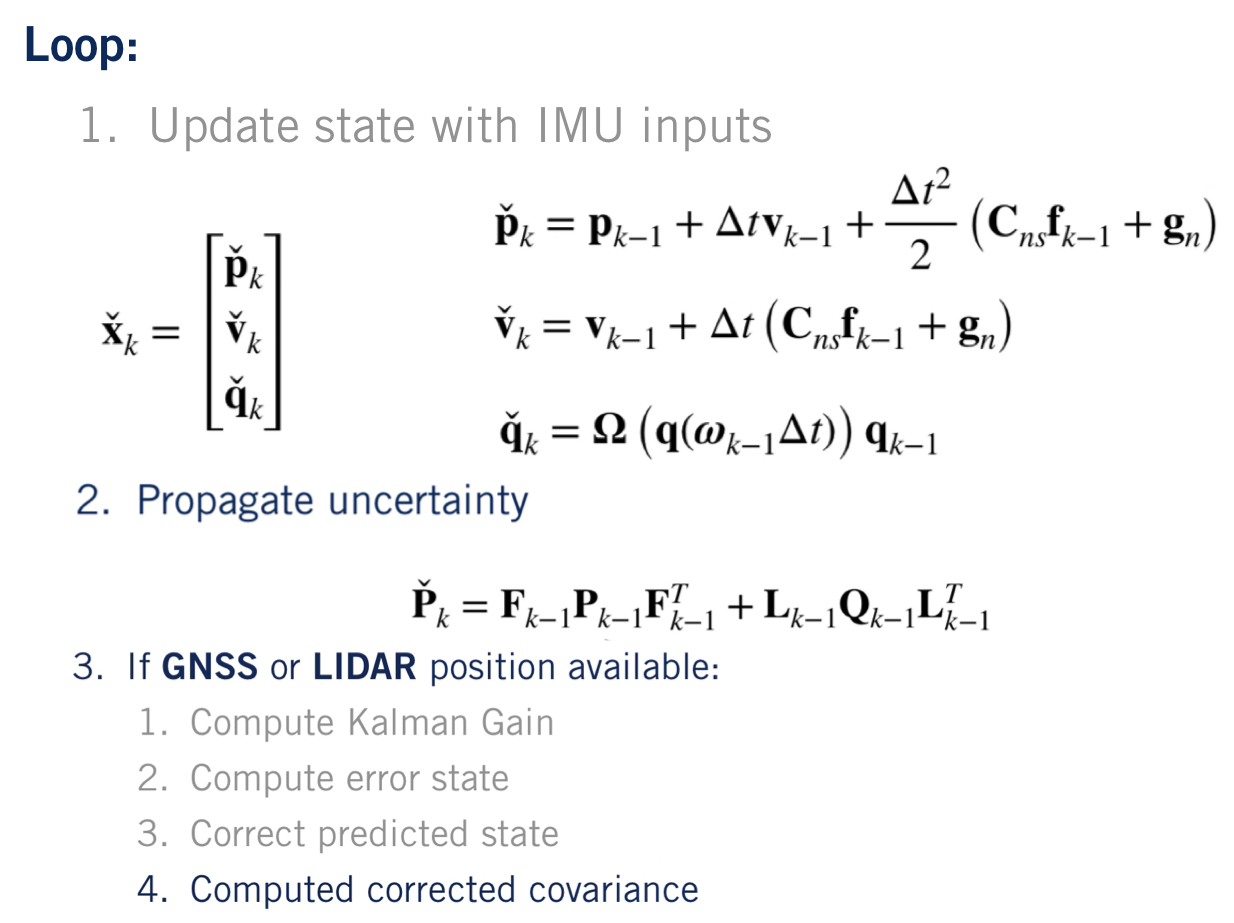
# 1. Update state with IMU inputs
C_ns = Quaternion(*q_est[k-1]).to_mat() # C_ns (rotation matrix)
C_ns_F_former = C_ns.dot(imu_f.data[k-1]) # C_ns * F_former
# 1.1 Linearize the motion model and compute Jacobians
# Position
p_est[k] = p_est[k-1] + delta_t*v_est[k-1] + (delta_t**2 / 2)*(C_ns_F_former + g)
# Velocity
v_est[k] = v_est[k-1] + delta_t*(C_ns_F_former + g)
# Orientation
q_est[k] = Quaternion(axis_angle=imu_w.data[k-1] * delta_t).quat_mult_right(q_est[k-1])
# 2. Propagate uncertainty
F = np.identity(9)
Q = np.identity(6)
F[0:3, 3:6] = np.identity(3) * delta_t
F[3:6, 6:9] = -(C_ns.dot(skew_symmetric(imu_f.data[k-1].reshape((3,1)))))
Q[:, :3] *= delta_t**2 * var_imu_f
Q[:, -3:] *= delta_t**2 * var_imu_w
p_cov[k] = F.dot(p_cov[k-1]).dot(F.T) + l_jac.dot(Q).dot(l_jac.T)
# 3. Check availability of GNSS and LIDAR measurements
if (lidar_i < lidar.t.shape[0]) and (lidar.t[lidar_i] == imu_f.t[k-1]):
p_est[k], v_est[k], q_est[k], p_cov[k] = measurement_update(var_lidar, p_cov[k], lidar.data[lidar_i].T, p_est[k], v_est[k], q_est[k])
lidar_i += 1
if (gnss_i < gnss.t.shape[0]) and (gnss.t[gnss_i] == imu_f.t[k-1]):
p_est[k], v_est[k], q_est[k], p_cov[k] = measurement_update(var_gnss, p_cov[k], gnss.data[gnss_i].T, p_est[k], v_est[k], q_est[k])
gnss_i += 1
f.close()
# Update states (save)
#already updated
Final results
| Ground Truth | Estimation |
|---|---|
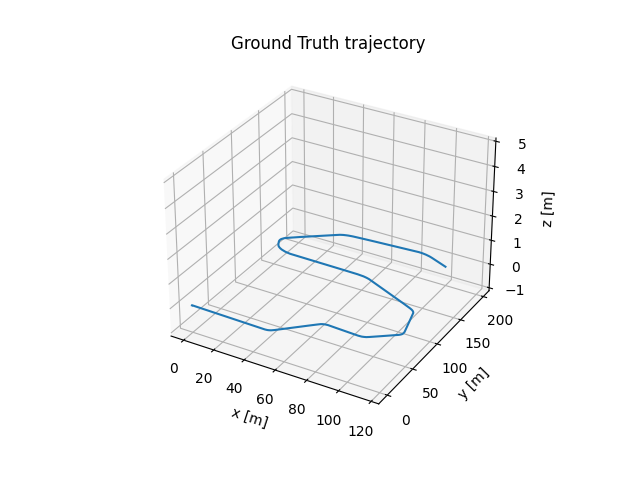 |
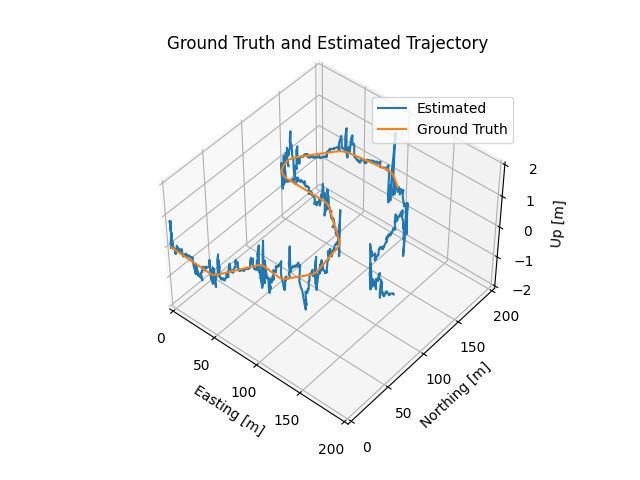 |